LOGO 550 SE. Hace tres años que empecé con este modelo y me convenció su tecnología, que para empezar es alemana y eso me daba mucha confianza. Dicen que son caros, y sus repuestos lógicamente también, yo no lo veo así, porque quienes se meten en esta modalidad del flybarless y encima eléctricos, me imagino que sabrán el terreno en donde pisan. A mi también me duele tener algún percance en el que tenga que "rascarme el bolsillo". De todos modos suelo hacer vuelos seguros sin ánimo de romper. En definitiva este Heli bien ajustado vuela muy bien.
Como comienzo compré el kit que incluía el helicóptero y el motor recomendado, un Scorpion HKIII 4025-1100kV. A parte necesitaba unos servos también recomendados, pero sin ser muy exigentes, bueno esta firma también los tiene, pero para mi nivel son más que suficientes, son los SAVOX, son tres servos SC 1257TG para el plato cíclico, y el de cola el SAVOX SH-1290MG. El regulador es el CastleTalon 120 HV, es más que suficiente, lo justo sería con 90 o 100 amperios, pero puse el 120, no disponían en ese momento, y yo que no quise esperar. La controladora es la BRIAN 2 de MSH Electronics.
EL MONTAJE DEL LOGO 550 SE.
El montaje es bastante rápido al principio, se trata de seguir el orden numerado de las bolsas y sobre todo identificar muy bien el tamaño de los tornillos para un correcto ensamblaje.
LOGO 550 SE
Presentación del kit y servos.
Una vez abierta la caja se supervisa y se identifican las bolsas. Con viene no ir destapando bolsas por que sí, lo correcto es empezar a abrir por orden numeral.
EL MONTAJE.
Comienza por el cuerpo o celda fuselaje.
Hay que prestar atención en la parte trasera del fuselaje donde se instalan los rodillos guía de la polea de transmisión de la cola.También en los rodamientos por el que girará el eje principal del rotor, y por último la bancada de aluminio que sujeta el motor antes de cerrar las dos semi mitades del fuselaje.
En la parte delantera van unas pletinas de aluminio en forma de "ele" que no es difícil su colocación solo que hay que fijarse en el tipo de tornillo y su longitud.
La bandeja inferior corredera sirve para sujetar la batería, pero hay retocarla suavemente por los laterales con taco de lija para que deslice con suavidad, porque puede ser que deslice muy agarrada o ajustada, en mi caso es muy poco lo del lijado.
Esta imagen corresponde al Logo 550 que he adquirido recientemente. El montaje es totalmente el mismo.
El rotor de cola requiere prestar mucha atención en cuanto al orden de posición de sus piezas. Conviene medio montar sin un apriete definitivo para cerciorarse de que todo está bien presentado y tal como lo indica el plano.
Lo mismo digo para el porta palas y eje. Los rodamientos del porta palas deben estar bien colocados en su alojamiento.
Comprobar que cuando realicemos el apriete definitivo, el no olvidar colocar en los tornillos el líquidofijador. Por otra parte que las piezas que giren sobre rodamientos que sea suave y sin sensación de dureza anómala.
Cuando se monta todo el conjunto se colocan en el eje de la correa una serie de arandelas, que habrá que tener especial atención de que estén correctamente situadas.
Finalmente la correa de transmisión deberá quedar encerrada en la caja de trasmisión..
Hecho en falta más dibujos explicativos más grandes, más detalles o croquis, porque otras firmas si las ofrecen. Por ejemplo tengo dos manuales distintos de Hirobo de la serie evolution con más profusión de dibujos y detalles de montaje, en fin unos se pasan y otros se quedan más cortos.
Quizá sea que estos modelos tan técnicos los montan aficionados con más experiencia en el tema y estén acostumbrados a estas mecánicas, por lo que no necesiten tanta información. Yo soy un modesto aficionado que intento seguir el curso de montaje en plan autodidacta, y con alguna esporádica ayuda de aficionados de mi club que han hecho sus pinitos en esta modalidad.
Pero eso sí, he dedicado bastante paciencia, ritmo de montaje sin prisas, buen gusto en el trabajo, y muchas horas averiguando en la web videos de aficionados explicando sus ajustes.
Este tema necesito explicarlo bien, porque va dirigido como ayuda a quienes empiezan con el flybarless eléctrico, generalmente los que empezamos no tenemos el suficiente nivel de vuelo y técnico y además buscamos asesoramiento, que es bastante difícil de encontrar y no digamos de comprender.
Mi filosofía va a ser que según el nivel de pilotaje adquirido, lo responsable es ajustar tu máquina de forma acorde con dicha experiencia. Para mi modesto nivel sería una temeridad, o una barbaridad que de buenas a primeras le ponga de paso -12 +12 grados, y activar el Governor para hacer en distintos modos de vuelo, o acrobacias, 3D etc.
Sé que dentro de un tiempo, y según mis progresos ya veré si poco a poco introduzco curvas de Motor y de Paso más atrevidas.
Ahora toca ensamblar el rotor de cola, tubo y la correa por su interior, que por cierto hay en el manual de montaje una indicación del sentido de torsión de 90 grados de la correa para que acople a la corona o polea del eje. Por el momento la tensión de la correa es provisional, o sea poco tensada, y ya la tensaré más adelante. Los tirantes del tubo cola y los patines, también se pueden instalar .
COLOCACIÓN DEL EJE PRINCIPAL, CORONA PRINCIPAL, Y LA CORONA DE LA CORREA.
Este eje lleva unas abrazaderas, arandelas y clip para que quede bien sujeto.
A continuación el motor se monta con dos tornillos más gruesos de métrica 4, y que van en una bancada de aluminio. Previamente se tiene que presentar el piñón del eje que habrá que ajustarlo a la distancia adecuada para que acople bien con la corona. Asegurar muy bien el apriete definitivo del motor a fin de que no se afloje de su bancada deslizable, porque si se afloja destrozaría los dientes de la corona principal, lo digo porque me ha pasado una vez.
Al plato cíclico se tiene que atornillar las rótulas colocándoles fija tornillos. Una de ellas es más largo el brazo que la sujeta porque es la que se deslizará por la guía trasera.
Se pueden colocar los servos, e instalarles en los brazos la rótulas a las distancias aconsejadas descritas en el plano.
El servo posterior resulta muy engorroso de atornillar sobre todo por la parte inferior que no hay apenas espacio para meter un destornillador. Yo lo he solucionado con una llave allen extralarga y ayudándome con unas pinzas.
MONTAJE DEL PORTA PALASPRINCIPAL. Hay muchas anillas de goma amortiguadoras, pero la parte más complicada es la colocación correcta de los rodamientos y arandelas que llevan los dos porta palas.
La barra roscada y me refiero a la que sirve de pasador para bloquear la pieza guía de la rótula del servo trasero recomiendo su apriete definitivo para el final por el tema de ajustes. Sus extremos son de aluminio y terminan en rótula pero su función es solo para sujetar la cabina de fibra.
Las varillas roscadas pero las de los servos con sus dos kwick lincs, puede que tengamos que enroscar o desenroscar cuando haga el ajuste de horizontalidad del plato, y no olvidemos el servo trasero es el más engorroso de manipular.
En la imagen se puede apreciar la instalación de la controladora BRIAN 2, esta conectada al receptorFutaba con un cable a una entrada SBUS para no tener que usar tanto cable. Esta controladora me encanta como funciona y su software una vez instalado en el PC solo tienes que ir siguiendo sus pasos, que resultan bastante intuitivos hasta para los más noveles.
En las instrucciones generales del Brian2 hace una serie de recomendaciones previas antes de empezar los ajustes, de cómo descargar la aplicación, los controladores certificados USB, o en el caso que tenga bluetooth emparejarlo. El mío no tiene bluetooth.
Como se trata de un heli eléctrico es necesario por seguridad desconectar de sus enchufes el motor delESC o regulador. Encendemos la unidad que como está conectada al receptor recibe corriente de todos modos. También conectamos el conector que va del PC a la controladora Brian2. Con todo esto ya se puede iniciar en nuestro ordenador la aplicación.
LA BRIAN2
En la primera página están las instrucciones generales donde introducimos todos los componentes que vamos a usar en nuestro heli, es decir, modelo o marca, palas principales, de cola, tipo motor, regulador, batería, servos del cíclico, de cola, tipo emisora, modo de vuelo o de trasmisión, es decir el conocido modo 2. Parece ser que esta firma de controladoras se ha molestado en hacer pruebas con las marcas más conocidas del mercado.
En la segunda página es la orientación de la unidad, dedicada a como hemos instalado o pegado con adhesivo de dos caras nuestra controladora, que si los cables hacia delante, o hacia atrás, hacia arriba, de lado izquierdo o derecho, etc. Si la unidad no esta pegada con un buen adhesivo y con la precisión adecuada puede que se vea afectado el rendimiento. Mi unidad la he colocado como figura en el primer dibujo o croquis (top up, wires front).
La tercera página, es la selección del receptor. Hay un montón de tipos de receptores conocidos, sólo es seleccionarlo.
La cuarta página representa en imágenes tipo esquema, de cómo conectar los servos a la controladora y además según el receptor elegido. Seguiremos según grafico la numeración, los 3 del cíclico, el de cola, el regulador, y la conexión que va del receptor a la controladora. Es importante no hacer cambios con los cables mientras tengamos en marcha y enchufados los servos o estemos configurando estos ajustes.
La quinta página son los ajustes que hay que hacer en la emisora. Primero que nada en el menú mezclas hay que dejar la emisora en mezcla de servosbásica (90º) que también la llamanH1. El TRIM y SUBTRIM a CERO.El DUAL RATE al 100%.
Los Exponenciales se gestionan desde esta unidad, pudiéndose cambiar según estilo de vuelo. Hay un estilo o mejor dicho RESCATE en la que hay que designar un interruptor para accionarlo. Este tema esta al final de los ajustes.
La curva de paso en la emisora hay que ajustarla en -100 y +100 y cero (0) en el centro del stick.. este mismo ajuste se realiza también para el resto de movimientos de profundidad alabeo, y rotor de cola.
Importante el motor desconectado por seguridad.Si los movimientos del stick no coinciden con lasalida que da el software hay que invertir en la emisora para corregirlo. Yo tuve que invertir el sentido del motor, el de paso, y el de alabeo.
Esto hay que averiguarlo, y ojo con este tema porque cuando conectemos el motor y estando el stick abajo, no se pondrá el motor en marcha porque tiene el sistema de seguridad, pero sí activará la programación del regulador con los famosos pitidos, y también si estrenamos regulador tendremos que calibrar el recorrido que hace toda la palanca del stick. Cosa que me pasó y tuve que calibrar dicho recorrido.
La ganancia de Cola. Hay que establecer una ganancia de giróscopo en nuestra emisora de un 45% en el panel, yo he puesto un 49 %, después puedo modificar y poner más hasta no más de 55%. Yo creo que este bloqueo de cola es bastante fino.
La sexta página es la selección del plato cíclico, el sentido de rotación del rotor, y la inversión de paso colectivo si procede. En los gráficos se indican los distintos ángulos que tienen los platos cíclicos.
El del Mikado Logo 550 es el HR-3 120º y la rotación CW del Rotor.
La séptima página es para el ajuste de servos, hay dos paneles de ajuste, el primero es para el cíclico y el segundo para el de cola.
El del cíclico: todos los servos deben ser del mismo modelo (fabricante y características). Además hay que tener mucho cuidado al elegir lafrecuencia de refresco porque una configuración incorrecta podrían dañarlo. Para averiguar su frecuencia se puede consultar haciendo clic sobre el cajetín deServos Chart Cyclic, porque existe un listado de muchas marcas de servos con sus características. Una vez encontrado el servo en el listado solo es clicarlo.
La octava página es para el ajuste del plato cíclico (salida). Previamente conviene dejar de modo manual a base de roscar o desenroscar los kwick links respetando las distancias de longitud de varilla aconsejadas y los brazos de los servos a 90º.
En este modo se apagan los giroscopios y también el acelerador en el trasmisor. Esto facilita un ajuste de la horizontalidad del plato, de modo que afina que cada brazo del servo sea calibrado colocando los brazos de los tres servos a 90º(este sería el segundo ajuste más fino). Explicado de otro modo primero hacemos uno manual (roscar y desenrroscar kwick links), y este último más fino es electrónico.
La novena página. Ajuste de la cola (salida). En este panel de ajuste si activamos la autorrotación o el corte de motor en la emisora, la unidad controladora entra en modo de comprobación (led verde apagado). En este modo ajusta la cola en modo deflexión y desactiva los giróscopos y acelerómetros, teniendo una zona muerta en la parte central del stick , por lo cual encontrar las posiciones de neutro, máximo y mínimo en mucho más sencillo.
También podemos en este panel el invertir el sentido del servo clicando en el cajetín de reverse.
Lógicamente el mejor de los ajustes es el del ajuste de recorrido de servo.
Décima pàgina. Medidas de palas. En mi caso se trata de dos "blades" , que es un bipala y de tamaño oscila entre 515-650. Solo es clicar en el cajetín correspondiente.
Onceava página. Autonivelado y rescate.
Hay que leerse ( y menos mal que las instrucciones de todo este programa viene con el idioma elegido porque tranquiliza bastante la comprensión de todo este embrollo de ajustes) toda la instrucción de este apartado para hacer correctamente los ajustes.
En mi caso me han ayudado a programarlo, pero lo he personalizado a mi nivel de pilotaje.
Para empezar tiene tres modos de configuración. El 1, el 2, y el 3. y otro más que se llama Canal aux.
Estos primeros modos, el 1,2 y 3 funcionan asignando un interruptor en la emisora que tenga 3posiciones. La primera posición yo la utilizo para el vuelo normal, porque los valores no afectan al vuelo, pero el segundo y tercero tienen valores que hacen el vuelo cada vez más rígido, y nospermitiría rescatar el heli. Yo me he dejado aconsejar por un amigo de afición que me ayudó a dichos ajustes.
El fabricante ruega encarecidamente de que en la 1ª configuración de no activar el Auto nivelado.
en las siguientes 2ª, 3ª y última si se puede.
A continuación indico de cómo me han aconsejado configurar el panel de auto nivelado / rescate.
Clicando sobre la imagen se puede visionar mejor la lectura.
Duodécima página. Ajuste de Motor & Governor. Como no voy a utilizar el Governor este es el ajuste que aconsejaron.
Clicando sobre la imagen se puede visionar mejor la lectura.
Décimo tercera página. Ajuste del estilo de vuelo. Asignando un interruptor de varias posiciones en la emisora podemos elegir el estilo de vuelo. Yo he asignado el mismo estilo de vuelo para las tres posiciones, es decir la de novato, aunque voy pronto a modificar y introducir el de sport.
He puesto como Ganancias de cíclico 50, y agilidad 30.
Décimo cuarta página. Comprobaciones finales y consejos de ajuste.
Se trata de leerse todos los consejos. Chequeos previos al vuelo de que todo se mueve correctamente, sobre todo de que las correcciones se realizan en el sentido correcto etc.
Ajustes de ganancias para eliminar sacudidas (cola de pez) , etc...
Aconseja realizar varios vuelos (unos 10) para asesorarse o acostumbrarse a estas reacciones.
La curva de paso que he programado en mi emisora FUTABA F14 SG es la siguiente
- 2.2º stick abajo,
+ 2º stick 1/4.
+ 5´2º stick a la mitad
+ 7.4º stick 3/4
+ 8.5º stick arriba, pero para la autorrotación de 10 a 12º.
Se trata de una curva de paso totalmente para vuelo iniciación.
En cuanto a la curva de motor es 0-25-50-75-100% en sus 5 puntos de calibración. Como la emisora
Futaba posee los potenciómetros de ajuste en la parte central del recorrido podemos recalibrar en el vuelo estacionario y poder modificar el 5´2º de paso, o el 50% en el motor.
La curva de paso tiene que tener este apecto a lo largo de todo el recorrido. Lógicamente es para principiantes o vuelos tranquilos.
AJUSTE DEL REGULADOR. Como puede comprobarse se trata de un TALON 120 HV.
Cuando lo estrené no tenía el dispositivo USB interface para programarlo adecuadamente. Durante bastante tiempo ha funcionado con los ajustes de fábrica.
He descubierto que volaba el heli con el regulador en modo avión, y una serie de ajustes que hubiera sido mejor haberlo sabido. Notaba que fino del todo no iba. El arranque era algo brusco, pero ahora con el ajuste con este dispositivo ha sido un cambio total y arranca muy suave y es como toca.
Otro asunto que me preocupaba es el ajuste del Timing y la frecuencia PWM, que según las características del fabricante, o modelo del motor, tiene que respetarse para no calentar o dañar el motor y el regulador.
El Castle link USB programming kit. Es un pequeño dispositivo con conexión tipo USB al PC y con un cable a la entrada del ESC.
Existe un download en, la web de este software, solo es buscarlo descargarlo e instalarlo.
Después de la instalación solo es conectar con el cable, entrar en la aplicación y buscar el regulador que utilizamos. En Device you are tryng to link, en el desplegable aparecen un montón de modelos de reguladores que están ordenados por orden alfabético, y clicamos sobre este.
Si empezamos de nuevo podemos ir a demo mode y salen los ajustes de fábrica, y sobre esto vamos modificando nuestro nuevo perfil. Finalmente se guardan los ajustes que se podrán consultar en un futuro sin necesidad de conectar el cable. En file si vamos a lo que hemos guardado podemos cargarlo de nuevo (load settings) yendo o buscando al final de los archivos d la carpeta Castle link con extensión dat .
Como ya lo tengo guardado los ajustes, puedo consultarlo y salvar algún cambio que necesite, pero dichos cambios hay que grabarlos estando conectados al regulador por lógica.
Describo los ajustes del regulador que he puesto según mis necesidades y estilo de vuelo.
THROTTLE
Vehicle type: Helicopter.
Throttle Type: Fixed End- Points. (la otra opción es la del Governor) yo de momento no la utilizo.
Throttle Response: medium (5).
Initial Spool-Up Rate :medium (5)
Head Speed Change Rate: medium (5)
BRAKE
Brake Strength:(0).
CUTOFFS
Cutoff Voltage; Auto Li-Po :(4.0)
Voltage Cutoff Type : Soft Cutoff (*)
Current Limiting: Normal (*)
Current Cutoff Type : Soft Cutoff (*)
Auto-Lipo Volts/Cells: 3.2 Volts/Cells
MOTOR
Motor start Power : Medium (59) (*)
Motor Timing : Normal (5)
Direction: forward (5)
PWM Rate: 8 Khz
OTHER
Power on beep : Enabled (5)
BEC Voltage: 6V (*)
Link Live Enable: Disabled (*)
SAVE PRINT
Load/save Settings.
Setting List printout.
Este apartado último es para cargar el archivo o guardarlo, para imprimirlo.
EL VUELO.
El 18 de febrero de 2023 hice un vuelo de prueba con este Mikado y fue muy satisfactorio en todos los aspectos. El arranque muy suave, a medio stick estaba en estacionario comportándose de cola de maravilla, el cíclico muy noble. A continuación tantee unos giros de cola para ver como se comportaba y era increíble la obediencia y rapidez, me daba mucha seguridad. Con el cíclico ocurría lo mismo, enseguida me plateé en lanzarlo en translación y si alejarlo virajes de ida y vuelta a no mucha altura. Con tres minutos de vuelo me lleno de satisfacción el haber mejorado con estos ajustes que era necesario realizar. Tengo un video de aquel día, pero voy a realizar alguno más completo próximamente.
Este vuelo es del 4 de marzo 2023. Ando ajustando la curva de paso.
EL LOGO 550.
El montaje de mi segundo LOGO 550 fue a mediados de diciembre de 2022. No es exactamente comoel SE, tiene el tubo de cola ligeramente más corto.
El logo 550 tiene el plato cíclico metálico o sea de aluminio, también el porta palas y la cabeza del Rotor. La verdad que con ese aspecto que viste mejor que el SE.
El conjunto de cola esta preparado para meter la correa. Los tornillos no están del todo apretados, solo será un poco de afloje, colocarla y cerrar de nuevo. Una vez metida la correa dentro del cajetín podemos también introducir el tubo. El tensado definitivo de la correa lo dejamos para más adelante.
Correa introducida en el cuerpo de la cola.
El heli está esperando la colocación de las coronas principales el eje y sus prisioneros.
Antes del conexionado de la electrónica que es lo viene a continuación, se supervisa que todo esté bien atornillado o definitivo, la tensión de la correa ajustada. El motor que engrane bien piñón y corona, y conviene dejarlo de momento desconectado. Varillaje del plato correctamente colocado.
EQUIPAMIENTO DEL LOGO 550.
Emisora FUTABA F14 SG
Los servos: Son los tres KST DS 725 MG HV para el cíclico, el de cola es KST DS 525 MG.
El motor es el mismo modelo que mi LOGO 550 SE, el Scorpion HKIII 4025-1100kV.
El regulador Hobbywing Platinum V3 de 100 A. Pero además tuve que adquirir el programador para realizar el ajuste con más seguridad.
La controladora es la DEMON BAVARIAN 3X.
Voy a conectar en la controladora los servos y además para la conexión con el receptor utilizaré el sistema de mazo de cables, porque con el SBus no lo he visto claro, no soy un experto en ese tema pero no me ha convencido de momento.
Del mazo de cables los dos primeros tricolor (blanco-rojo-negro) , el primero es para el canal de 1 de alabeo e irá conectado al receptor al 1, el segundo cable tricolor es para conectarlo al del elevador o segundo canal en el receptor. El cable naranja va al canal 6 , el amarillo al canal 4, el gris canal 5, el verde no lo he conectado a nada.
En cuanto a donde conecto los servos del cíclico: Comienzo desde la muesca de la parte central con el servo 1, luego el 2, y 3, dejo uno libre a continuación, y el de la esquina o final para la cola.
El regulador va conectado directamente al receptor en el canal 3.
La conexión para el USB al PC está indicada en el esquema que ofrece el fabricante y está al lado del mazo de cable (es la esquina).
CONFIGURACIÓN DE LA DEMON BAVARIAN.
Comienzo comprobando que están todas las conexiones en su lugar tanto para la controladora como receptor y servos y regulador. Es importante ahora desconectar las conexiones del Motor. Todos los ajustes que hay que realizar serán sin motor por razones de seguridad.
Una vez instalado el programa en el PC entramos en la primera página donde elegimos idioma, tipo de dispositivo, también nos aparece la versión del software, hay un cajetín para actualizarlo si procede.
A la derecha en archivo podemos guardar o cargar los ajustes. Después los ajustes por defecto en fábrica por si reset. Más abajo a la derecha aparece donde leemos lo que hemos ajustado para después escribirlo o validarlo. Más abajo del todo en el cajetín indica si estamos conectados con el cable etc.
1. Panel se llama RC.
Tipo de servo cabeza (digital o analógico). Los tres son digitales.
Tipo de servo de cola (digital, analógico, 750us). Yo lo he puesto en 750us.
Tipo de conexión del receptor: en Mazo cables.
Deadband : 0.
El resto de asignaciones no proceden porque utilizo mazo de cables.
2. Diagnostic. Es importante en la emisora de radio hacer coincidir las direcciones, recorridos y trims neutro, para que coincidan con las barras del panel.
3. Trim: Servos permanecen en posición neutral, sin función stick.
Este panel se utiliza para el ajuste de los brazos de servo ortogonal a su varilla de empuje. En muchas ocasiones el brazo del servo no queda exactamente a 90º y retocando con las flechas podemos dejar el plato cíclico totalmente plano y a nivel. No olvidemos que cada panel hay que validar para pasar al siguiente.
4.Mixer. Este panel es bastante extenso.
Montaje lateral: vertical
Montaje orientación: trasero.
Dirección rotor principal: derecho.
Tipo plato cíclico: Tri 120º.
Servo inversor: 1 plato servo Izda. (-)
2 plato servo Dcha. (+)
3 plato servo medio(elev.) (-)
Servo de cola y dirección gyro (+)
Cambio de dirección. Aleron (+) Recorrido-Servo (75)
Elevador (+) Recorrido-Servo (75)
fase cíclico (rotación plato cíclico) (0)
Sinus linealizador (3)
Recorrido coll.pitch (75)
Collective offset (0) Validamos y pasamos.
5 Gyro cola.
Preestablecido: GY 401. Clicando GY 401 se configura todos los datos que vienen a continuación:
Recorrido servo limitación Izda (80).
Recorrido limitación Dcha. (80).
Giro cola ganancia por defecto. ------------------------I---------------- (55)
normal/rate bloqueo cola
Ratio guiñada, agilidad (8).
Guiñada expo: (0).
Retardo:(4).
Configuración expertos: P-ganancia (18).
Hold Power: universal.
Compensación torque: revo mix (0).
c.pitch rango: symmetric.
Validar y escribir.
6. Config. Rigid. Preestablecido : ACRO. Clicando acro se configura todos los datos que vienen a continuación:
Gyro de cabeza ganancia por defecto: (55).
Info optimización FBL:
Rigid. (sens.) ganancia aleron (16).
Rigid. (sens.) ganancia elev. (16).
Agilidad (ganancia stick aleron y elev. (12).
Inicial respuesta (porción control directo) (5).
Elevador filtro (3).
P- parte (40).
D-parte para eleva. (10).
Bloque altitud rango (10).
Reducción velocidad (5).
7. Reservado para el Gyro 3SX.
Una vez finalizado el ajuste de la controladora se guarda en la primera página del programa clicando en el cajetín guardar.
AJUSTE DEL REGULADOR. Por seguridad yo quito las palas del rotor principal y las de cola.
El regulador que utilizo es el Hobbywing Platinum de 100A.
Las conexiones del regulador que yo utilizo son el TRHO que va al receptor al canal del motor o sea el 3 channel. Los del RPM y el BEC no los utilizo de momento. Finalmente el conexión con el dispositivo programador dejo conectado el pequeño cable prolongador por comodidad, cuando deseo programar solo es desplegarlo y conectar con dicho programador.
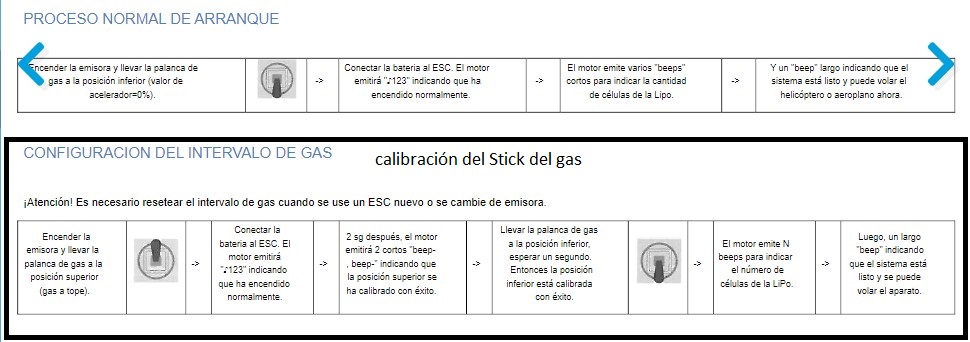
Comenzar a usar un regulador o ESC nuevo.
Antes de usar un nuevo ESC, es necesario comprobar todas las conexiones para asegurarse que son correctas y fiables antes de conectar el ESC a la Batería. Tras asegurarse que todo es Ok , encender el ESC en la secuencia siguiente:
1. Llevar la palanca de gas a la posición inferior (valor de aceleración 0%) y luego encender la emisora.
2. Conectar el paquete de baterías. El ESC comenzará un autotest tres beeps musicales indicando que el sistema ha encendido y el número de beeps cortos según las células del paquete de baterías y finalmente un beep largo que indica que el sistema ha finalizado y está listo para volar.
Anomalías
Si no se recibe respuesta comprobar batería y conexiones.
Si el motor no suena , significa que la tensión o voltaje es demasiado bajo o alto. Comprobar batería.
Si el motor suena beep-beep 2 segundos después de encenderlo y tonos musicales 5,6,7,1,2 5 segundos más tarde para indicar que el ESC está entrando en modo programación. Esto nos está indicando o significa que la dirección del canal del gas en nuestra emisora está invertido. En tal caso, se necesita cambiar la dirección "normal/reverse".
3. ¡Atención! Para asegurarse de que el ESC toma correctamente el rango de gas de la emisora, hay que resetear el rango de gas cuando utilice por primera vez o se cambie de emisora para asegurar una linealidad de aceleración óptima.
Yo he tenido que hacer una calibración del stick del gas.
Los reglages de la Curva de Paso son los mismos que he puesto en el LOGO 550SE:
La curva de paso que he programado en mi emisora FUTABA F14 SG es la siguiente
- 2.2º stick abajo,
+ 2º stick 1/4.
+ 5´2º stick a la mitad
+ 7.4º stick 3/4
+ 8.5º stick arriba, pero para la autorrotación de 10 a 12º.
Se trata de una curva de paso totalmente para vuelo iniciación.
En cuanto a la curva de motores 0-25-50-75-100% en sus 5 puntos de calibración. Como la emisora
Futaba posee los potenciómetros de ajuste en la parte central del recorrido podemos recalibrar en el vuelo estacionario y poder modificar el 5´2º de paso, o el 50% en el motor.




.jpg)
















.jpg)